
A Mechatronics-inspired Multi-agent Model for Social and Professional Equity
BY Prof. Clarence W. de Silva
Abstract
This article presents a multi-agent mechatronic viewpoint for realizing some favorable characteristics in a human community. Specifically, analogies exit between equity, diversity, and inclusion (EDI) in a community, and the corresponding optimal or unique, unified, and integrated characters, respectively, in a multi-agent mechatronic system. Ways to realize the desired EDI in a community, through inspiration from a properly developed multi-agent mechatronic system, in an “intelligent” manner, which possesses the analogous optimal/unique, unified, and integrated characteristics, respectively, re are indicated. The reverse process of realizing a proper multi-agent mechatronic system through inspiration from a well-developed human community is another benefit of the indicated methodology. The end message of the article twofold:
1. The realization of a desirable multi-agent mechatronic system can be inspired by the way of achieving equity, diversity, and inclusion in a human community,
2. The realization of equity, diversity, and inclusion in a human community can be modeled through the analogous characteristics of optimal/unique outcome, unified methodology, and integrated treatment in a multi-agent mechatronic system.
Introduction
A diverse community is well-served by working together in a cooperative manner (i.e., with a mindset of fair accessibility for and collaboration or “inclusion” of everyone), while understanding and gauging the member performance through a compatible yardstick and respecting the heterogeneous nature and needs or “diversity” of the members by providing equal opportunity to all the members of the community, resulting in a fair, balanced, and effective outcome (i.e., realizing “equity”). Since we commonly engage in multidisciplinary and multitasking activities, we are required to work together for effectively achieving the end objectives. This consideration is applicable in any context or setting such as professional (e.g., technical, medical, commercial and business, and administrative), social, educational, political, and sports (this could fall into the professional setting as well). No matter from what viewpoint it is addressed, working cooperatively, inclusively and effectively while respecting the equity, diversity, and the personal needs of the community members (agents) is paramount. This article addresses some key issues in this regard. As our ancient literature says, since one person becomes an expert in just one area, it is difficult to be the “best” in every aspect of an undertaking or a process. Yet, one may seek to achieve some balance or equity or optimality in several objectives.
In comparison, an introduction to multi-agent systems is appropriate. Cooperative operation of multiple agents (typically, physical devices such as robots, but may include software modules), and optimization of such systems have been extensively investigated. In this backdrop, optimal sharing of resources (e.g., of dynamic agents) among multiple applications under a common system framework has been achieved as well. Information fusion is the process of combining the information from multiple sources to improve the final outcome/inference/decision
in a system. In agent modeling, self-awareness and attention have been incorporated to the agents. Decision making in a multi-agent system may be treated as an optimization problem, and several procedures of optimization, some including both qualitative and quantitative objectives, have been developed. In a mechatronic system, this may be achieved through a process of multi-objective optimization.
A parallelism or “analogy” can be drawn between a “Community” and a “Multi-agent Mechatronic System.” A desired way to incorporate equity, diversity, and inclusiveness (EDI) into a community may be inspired and achieved by considering the process of realizing a desirable multi-agent mechatronic system, with the optimal or unique, unified, and integrated characters, respectively.
Equity, Diversity and Inclusion (EDI)
EDI is very important for the sustainability of a community no matter what the nature of the community or organization is. Extra effort must be made to include diverse members into any organization and also provide them equal opportunities, and treat them uniformly and in a respectful manner, without discrimination. We often separate (and discriminate?) people based on gender, race, religion, culture, age, social status, educational qualification and so on. This is a very sensitive issue, and it is important to pay particular attention to it, in any organization. The yardstick of assessing the value of diversity in a human community and providing them opportunities should be uniformly similar and fair (i.e., in a “unified” manner, in the vocabulary of Mechatronics).
In social environments, equity and civility may be implicitly enforced through the race, the religion and the culture of the participants. I remember that in my childhood, when we lived in a village where my parents were teaching, we commuted to the city of Badulla several times a month. We would break our journey at a Muslim shop (where we did much of our grocery shopping). The shop owner was a very gentle soul, who would invite my father and me to join them for lunch. We would sit around on the floor in the dining area, together with the shop owner and the workers of various ranks. We would serve ourselves food from common plates that were placed in the middle of the dining area, onto our individual banana leaves, and enjoy. It was a remarkable experience. One problem was clear to me then. My mother (or any female) was not invited to take part in the lunch with us. We made sure that my mother had her lunch separately at the nearby school (whose headmaster was a friend of my parents). Also, as a student in USA, I frequently visited the apartment of a Hindu friend, who was a strict vegetarian, and his place did not have any furniture. We would remove our shoes at the entrance, sit on the floor, talk and eat. That too was quite enjoyable. Recently I saw a video where Prime Minister Modi of India would throw away the special chair that was reserved only for him, and then sit on the floor with the other participants, young and old. These are examples where equity and inclusion are naturally realized or needed, to some extent. In essence, any organization should be inclusive, respectful, collegial and collaborative.
Mechatronics Viewpoint
The formal and enhanced definition of a mechatronic system has been established [1]. It seeks an “integrated” and “unified” treatment of a dynamic system that would generate an “optimal” or “unique” outcome for the system. Here, Integrated means, a concurrent or simultaneous treatment, which would consider all physical domains of the system simultaneously, while including “coupling” or “dynamic interactions” or “energy conversion” that exist among them; Unified
means, a mechatronic approach would exploit analogies or similarities among different physical domains in the system, and would use similar or analogous procedures to model the dynamics in those physical domains; Unique means, the realization of a “unique” outcome (e.g., by a procedure that leads to the “best” outcome). This implicitly implies that some form of “optimization” is associated with the used procedures. In addition, as a procedural requirement, Mechatronics would follow a “systematic” procedure; i.e., it would follow a clearly indicated sequence of steps, without any confusion as to the approach or the activity and the outcome. In this backdrop, by taking inspiration from Mechatronics, the realization of EDI within a community may possess the conceptual analogies that are indicated in Table 1.
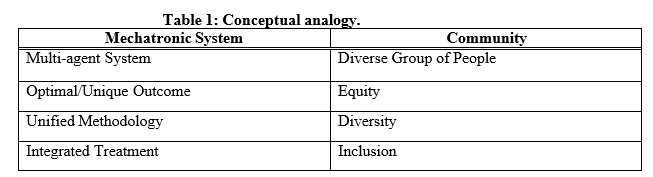
In this analogy, a “diverse community” may be represented by a “multi-agent system” where the agents would interact with each other. The agents are the members of the community. Then, working together in a cooperative manner, with a mindset of accessibility for and collaboration or “inclusion” of everyone, would be analogous to the “integrated” approach in Mechatronics. Understanding and respecting the heterogeneous nature and needs or “diversity” of the members, and providing to all the members of the community, equal opportunity, as gauged by a compatible yardstick would be analogous to the “unified” treatment in Mechatronics. The realization of a fair, balanced, and effective outcome within the community, is the realization “equity.” This would be analogous to the “optimal” or “unique” outcome in Mechatronics. By taking inspiration from this mechatronic analogy, it would be feasible to come up with a practical framework for realizing EDI in a diverse community, by treating it similar to a multi-agent mechatronic system. The modeling, simulation, design, and implementation of a process to achieve EDI could then be carried out through the means of Mechatronics. The reverse process of designing proper mechatronic system through inspiration from an effective community of humans is similarly possible.
Organizational Structure
In any community, a multi-person (i.e., multi-agent) activity will be facilitated by some organizational structure [2]. This may be either enforced or natural, and permanent or temporary (and ad hoc, as necessary). The two extremes of any organizational structure are centralized (and hierarchical) and fully distributed (and decentralized).
In a typical hierarchical or centralized structure (see Figure 1), the decisions are made at an upper level and communicated down the chain of command. Specifically, the decision maker at the top of the hierarchy determines (establishes) a set of required cooperative tasks and assigns them to the agents (i.e., leaders who are members of the community) in the immediately lower level in the hierarchy (and they may assign associated subtasks to agents or lower level leaders below them, and so on). The agents will determine the most appropriate actions for themselves, based on their knowledge, needed skills—self-awareness, available resources, and so on. Since,
often, cooperation of other agents would be needed to carry out a task (i.e., a cooperative task) the specific agent has to know the related attributes of the other agents as well, and also their availability. Effective communication is essential here. Often, prior to making the final decision, the agents may communicate the acquired information to a decision maker at an upper level, who will evaluate, moderate, and make the final determination. Hence, in a more flexible communication structure, the unidirectional (top-down) communication that is shown in Figure 1 may be made bidirectional, which will be more inclusive.
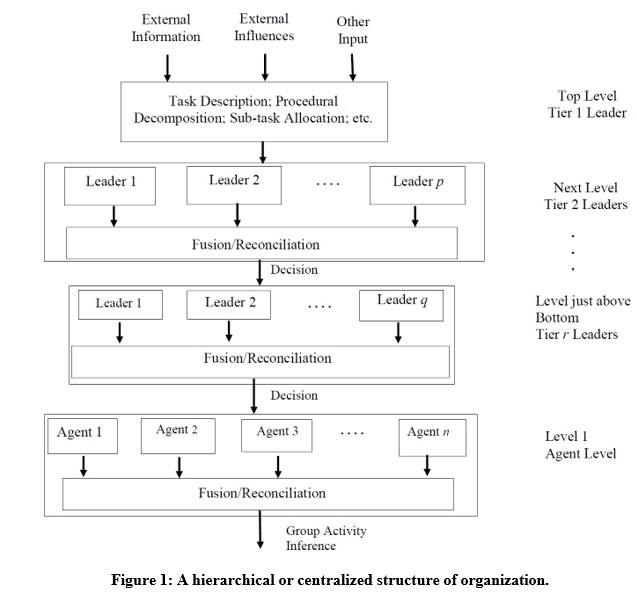
At each level in Figure 1, the agents (i.e., level leaders) determine the most appropriate actions for themselves (based on their knowledge needed for cooperative tasks, their abilities—self- awareness, and their knowledge/perception of the abilities of the other agents, and will make a decision. The upper level leaders will evaluate or moderate the decision and make the final determination. This is a process of Fusion or Reconciliation. The hierarchical structure has the
advantage of a clear line of command. Yet, it can be rather authoritative and can be demotivating for the agents. In view of the long chain of command, the actions in response can be slow.
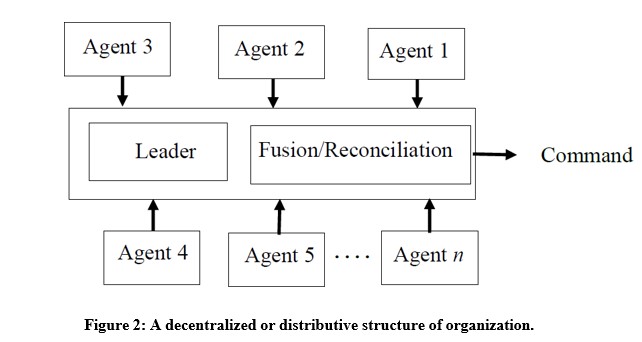
In a fully decentralized and distributive structure (see Figure 2), the agents are conceptually considered to be equal within a common hierarchical level, albeit with a single leader who manages these agents. Many of the relevant activities that were mentioned under a hierarchical structure (Figure 1) would still be necessary then. In the beginning, there may not be a group leader in this conceptual structure, and it may be necessary to select a leader to resolve issues that may arise during the activities. The leader may be chosen, albeit temporarily, and with the consent of the agents. The leader may have authority only over a subgroup of agents, not all the agents in the organization. The advantages and disadvantages of a hierarchical structure will be the disadvantages and advantages, respectively, in a decentralized structure.
A crucial consideration in an organizational structure is the establishment of a management plan. In particular, the plan should indicate effective feedback paths from different activity entities (and hierarchies, if the structure is hierarchical). Synergy should be present among the agents in a specific task group, and this will help increase the effectiveness and efficiency (including speed) of the task activities. There are two other aspects of management that must be explicitly addressed. First, there needs be clarity in the agent partnership of the activities in the subtasks, with regular inter-communication, assessment, and decision making. Second, from the very inception of a project, the authority of the collaborators to modify/change the emphasis/direction of various activities should be clearly articulated. A critical guideline for any organization is that the leader should not be a dictator, as will be clear from this article.
Conflict Resolution
Regardless of the nature of the organization, conflicts are bound to happen. A reason for them could be the lack of proper understanding of the agents, their backgrounds and needs, and the nature and the possible cause/origin of the conflict. Effective and regular communication is a good tool to avoid serious and unnecessary conflicts.
When a conflict arises, it may be possible to resolve it through dialog. A platform must exist to carry out such dialog, quite early in a situation of conflict. If not resolved, it may be necessary to seek help from a mentor or a task leader. Reassignment of tasks and personnel may be needed or possible as the last resort, in resolving a conflict. Above all, any discriminatory barriers must be removed in the organization, to minimize conflicts.
Multi-agent Systems
In a multi-agent system [3-5], the agents (or community members) work together to make decisions regarding the needed actions. The structure of a multi-agent system is shown in Figure 3.
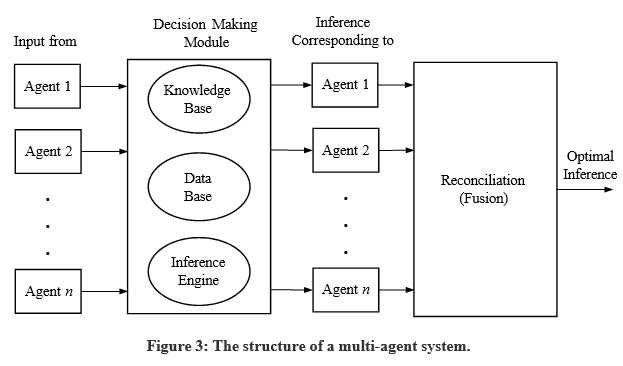
The inputs from the n agents in the system go into the decision making module [6]. The three basic components of this module are shown in Figure 3. They are the knowledge base, the data base, and the inference engine. The decision making module is able to make new inferences or decisions using its reasoning mechanism (inference engine), by interpreting the meaning and implications of the new information within the capabilities of the existing knowledge base. The associated decision-making task is the “intelligent” processing of data with available knowledge (the task of the inference engine). This activity is what is shown as fusion or reconciliation, in Figure 1 and Figure 2. It involves matching the considered data with the knowledge, and it may lead to the enhancement, refinement, and updating of the knowledge base itself, through intelligent decision making.
Knowledge Base: Central to the decision making module is the Knowledge Base. It contains knowledge and expertise in the specific domain, particularly the domain-specific facts and heuristics useful for solving problems in the domain. This knowledge is commonly represented as a set of if-then rules.
Data Base: The second basic component of the decision making module is the Data Base, which is primarily located in a short term memory. The data base may contain the current status of the problem, inference states, and all the available data (including any new data). The externally provided new information (inputs) are also stored in the data base. This data represents the “context” of the decision-making process.
Inference Engine: The Inference Engine is the “driver” of the decision making module. It “processes” the data in the data base together with the knowledge in the knowledge base, to solve problems and arrive at inferences. It follows that the representation and the processing of knowledge are central to the functions of the decision making module. Some form of optimization will be useful in the decision making.
Fusion/Reconciliation: In Figure 3, the individual inferences corresponding to the inputs from the agents are “fused” through a process of reconciliation, by a leader or a moderator, to arrive at the overall inference. Fusion involves the combination of the inferences from the agents to improve the “quality” of the inference. The quality may include such aspects of the inference as accuracy, reliability, robustness, confidence (reduced uncertainty), usefulness, and the detail or completeness or comprehensiveness.
Optimization: It is known that optimal or unique outcome is a key goal of a mechatronic system [1]. In a mechatronic system, this is realized primarily in one of two ways. 1. If the mechatronic procedure leads to more than one design in a system, pick the best design among them; 2. Implement a procedure of multi-objective optimization. The latter may be achieved through a procedure of machine learning, such as deep learning or convolutional neural networks [7]. Here, it is important to include the “physics” of the problem, not just the observed “data” [8]. Since, in a human centric system, both quantitative and qualitative criteria have to be considered in optimization, an appropriate approach for that purpose has to be used [9]. It should be noted that the optimization of the decision making may be done at both the agent level and the system level.
System Operation: The system may have a hybrid form with both distributed and centralized characteristics. Its operation may follow the following steps: 1. Based on the system conditions and requirements, the central decision maker (CDM) will determine the required cooperative tasks (optimally) and announce them to the agents; 2. Each agent will determine the most appropriate actions for itself (based on its knowledge of the needed tasks, own abilities—self-awareness, and knowledge/perception of the abilities of other agents, etc.), in a local (from agent’s perspective) manner; 3. The CDM will evaluate/moderate the agents’ determinations and make the final decision; 4. Finally, the system performance may be determined, improvements could made, and subsequent tasks would be established.
Decisions: Local (agent’s) and central decisions may include: What are the agent’s actions (e.g., to cooperate or not, optimally perform its task); modifications to the agent’s operations; modification of the system structure (e.g., select the leader, add/remove agents) if necessary.
The present section has exclusively considered a model of a multi-agent mechatronic systems. Since the final focus of the article is the achievement of EDI in a community, the indicated concepts of a multi-agent mechatronic model may be extended to that, particularly in view of the
analogy that has been brought up earlier in the article, related to Equity, Diversity, and Inclusion, which are analogous to Optimal, Unified, and Integrated character in a mechatronic model (see Table 1). In other words, proper realization of EDI in a community may be designed and simulated using a multi-agent mechatronic model.
General Guidelines
Any organization has a management structure, which may be natural or enforced, hierarchical or decentralized, and permanent or ad hoc. The organization should establish a careful management plan. The leader of the organization or group should not be a dictator. Synergy should be present among the agents in a task group. There should not be discrimination based on gender, race, religion, culture, age, social status and so on. The members should be provided equal opportunity, and treated uniformly and in a respectful manner. Any discriminatory barriers must be recognized early and removed completely. While the group members are collegial and collaborative, there bound to arise conflicts. They must be resolved as early as possible, through dialog, mentoring, and even the reassignment of the tasks and the personnel.
A multi-agent mechatronic system possesses similarities to a community of people. Such a model can be inspired by the community, and conversely, the organization of the community, while satisfying equity, diversity, and inclusion (EDI) can be improved and enhanced through the use of a properly designed multi-agent mechatronic system. As President John F Kennedy historically said, and as Rodney Brooks [8] recently modified it to suit the current state of artificial intelligence (AI), the present article further adapts it as follows: “Ask not only how a properly organized community can inspire the design of a multi-agent mechatronic system, but how a properly-designed multi-agent mechatronic system can help improve the organization of a community, in meeting the requirements of equity, diversity, and inclusion.”
Conclusions
This article introduced a multi-agent mechatronic viewpoint to realizing some favorable characteristics in a human community. Specifically, it was pointed out that analogies exit between equity, diversity, and inclusion in a community, and optimal or unique, unified, and integrated characters, respectively, in a multi-agent mechatronic system. Ways to achieve these three desired characteristics of a multi-agent mechatronic system, in an “intelligent” manner were indicated. The end message of the article constituted:
1. The realization of a desirable multi-agent mechatronic system can be inspired by the way of achieving equity, diversity, and inclusion in a human community,
2. The realization of equity, diversity, and inclusion in a human community can be modeled through the analogous characteristics of optimal/unique outcome, unified methodology, and integrated treatment in a multi-agent mechatronic system.
References
1. De Silva, C.W., MODELING OF DYNAMIC SYSTEMS—With Engineering Applications, 2nd Edition, Taylor & Francis/CRC Press, Boca Raton, FL, 2023.
2. De Silva, C.W., “Working Together in a Mutually Respectful Environment,” Lions Club Newsletter, Sri Lanka, pp. 11-12, July December 2021.
3. Wooldridge, M., (2002), An Introduction to Multi-agent Systems, John Wiley & Sons, Hoboken, New Jersey, 2002. ISBN 978-0-471-49691-5.
4. Ren, W. and Beard, R. W., “Consensus seeking in multi-agent systems under dynamically changing interaction topologies,” IEEE Transactions on Automatic Control, Vol. 50, No. 5, pp. 655-661, 2005.
5. Olfati-Saber, R., Fax, J. A., and Murray, R. M., “Consensus and cooperation in networked multi-agent systems,” Proceedings of the IEEE, Vol. 95, No. 1, pp. 215-233, 2007.
6. Karray, F. O. and de Silva, C. W., Soft Computing and Intelligent Systems Design—Theory, Tools, and Applications, Addison Wesley, New York, NY, 2004.
7. Young, T., Hazarika, D., Poria, S., and Cambria, E., “Recent Trends in Deep Learning-based Natural Language Processing,” IEEE Computational Intelligence magazine, Vol. 13, No.3, pp. 55–75, 2018.
8. Brooks, R., “A Human in the Loop—AI Won’t Surpass Human Intelligence Anytime Soon,”
IEEE Spectrum, pp. 48-49, Vol. 58, Issue 10, October 2021.
9. Falch, L. and de Silva, C. W., “Fuzzy Techniques to Reduce Subjectivity and Combine Qualitative and Quantitative Criteria in a Multi-objective Design Problem,” 9th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, pp. 42-48, November, 2018.
 Eng. (Prof.) Clarence W. de Silva
Eng. (Prof.) Clarence W. de Silva
Professor of Mechanical Engineering
The University of British Columbia
Vancouver, Canada



