
EEG Based Brain Computer Interface (BCI) for the Robot Controlling Systems
By Eng. H.M.K.K.M.B. HerathThe field of Robotics is growing fast to make human life efficient and easy. There are various machines and robot designs are manufactured in a particular field to help people. The biosignal based controlling system is the next step in order to achieve more accuracy. Electrical biosignals or bioelectrical time signals are usually referred to as the change in electric current produced by the sum of an electrical potential difference across a tissue, organ or cell system. Best known biosignals for the brain computer interfacing are Electroencephalography (EEG), Electromyogram (EMG), Electrocardiogram (ECG), Mechanomyogram (MMG), Electrooculography (EOG), Galvanic Skin Response (GSR) and Magnetoencephalogram (MEG).
The Brain Computer Interface (BCI) is a system that measures the activity of the central nervous system of the human body and converts it into an artificial output. This activity is commonly measured by Electroencephalography (EEG) signals. Electroencephalography is a method that measures the electrical activity of the brain. The primary motor cortex (Figure 1) is mainly responsible for the motor imagery function which is uniquely important for the execution of movements. The International Federation of Clinical Neurophysiology adopted the standardization for EEG electrode placement called 10–20 electrode placement protocol. According to the protocol, EEG electrodes are needed to place to cover the primary motor cortex area for the data acquisition related to the execution movements of the hands, arm, face, trunk, tongue, hip and foot.
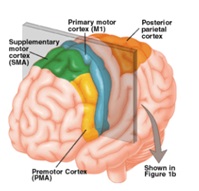
Figure 1: Primary Motor Cortex of the Human Brain
The architecture of the EEG based control system (Figure 2) comprised of Data Acquisition, Feature Extraction, Classification and Decision Controlling. After EEG is acquired by the Data Acquisition system, pre-process is used to remove the noise from raw signals caused by biological and technical incidents. Laplacians algorithm is widely used for spatial filtering and gives smooth output signals by reducing the artifacts. A high pass filter with a cut-off frequency of 0.5 Hz is used to remove the disturbing very low frequency component. High-frequency noise is mitigated by using low pass filters with a cut-off frequency of 40 Hz. Figure 3 depicts the before and after pre-process of the EEG signals.
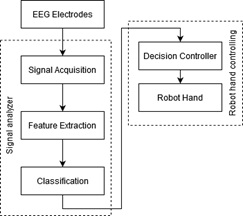
Figure 2: Architecture of the EEG Based System
Signal acquisition is also used for the classification of frequencies according to the brain wave types such as Delta-δ (0.1 - 04 Hz), Theta-Θ (04 - 08 Hz), Alpha-α (08 - 12 Hz), Beta-β (13 - 30 Hz) and Gamma-γ (40 - 80 Hz). The development of BCI systems with general versatility can be expected by using the alpha waves. The frequency of the alpha wave is about 08 - 12 Hz and amplitude increases when the eyes are closed in a relaxed state.
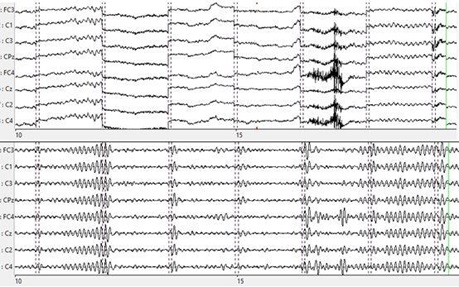
Figure 3: From Top to bottom - EEG Raw Signals, Pre-processed EEG Signals
High accuracy and speed are required for the interface to control systems such as robot arms. The decisions for the controlling systems are generated according to the classification of the features which are extracted. Machine learning techniques are widely used for the classification of EEG data according to the thoughts. EEG feature extraction methods such as Time Domain Features, Frequency Domain Features, and Power Spectrum Features are widely used. For the classification methods Linear Discriminant Analysis (LDA), K-Nearest Neighbour Algorithm (k-NN), Support Vector Machine (SVM), Multi-Layer Perceptron Neural Network (MLPNN) and Decision Trees (DT) are used.
Recent studies led by me (ELECTROENCEPHALOGRAM (EEG) CONTROLLED ANATOMICAL ROBOT HAND) show the development of a robot arm which is working the same as the human hand is possible. Anatomy of the human hand is associated with the primary motor cortex of the human brain. Figure 4 shows the simulation results for the flexion and tensor movements according to the thoughts generated by the primary cortex of the brain.
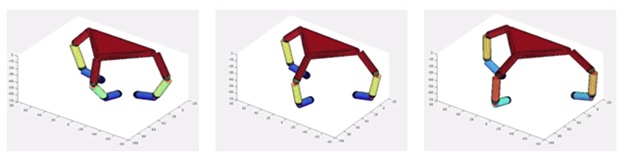
Figure 4: Hand Simulation for the EEG Results
Therefore, Brain Computer Interfacing can be used to pick and place robot manipulators. Moreover, BCI systems are most suitable for the application such as Gaming & Entertainment, Smart Environment, Security & Authentication, Health Care and Education.
Eng. H.M.K.K.M.B. Herath
Faculty of Engineering Technology, The Open University of Sri Lanka.
kasunherathlive@gmail.com




