
Brain-Computer Interfacing for Assistive Robotics
By Eng. H.M.K.K.M.B. HerathBrain computer interfaces
BCIs have gained a great deal of interest from robotic organizations, neuroscientists, computational scientists and neurologists over the past few years, prompted by recent technological developments in decoding brain processes and innovative implementations. Brain-computer interface (BCI) technology aims to create a connection between the brain and any electrical, electronic system utilizing electroencephalogram (EEG) which is a non-invasive technique for calculating electrical potential from electrodes mounted on the scalp generated by brain activity. The BCI program will use our emotions to guide a robot or other assistive equipment. Such a program can help individuals with generalized paralysis achieve a certain degree of freedom.
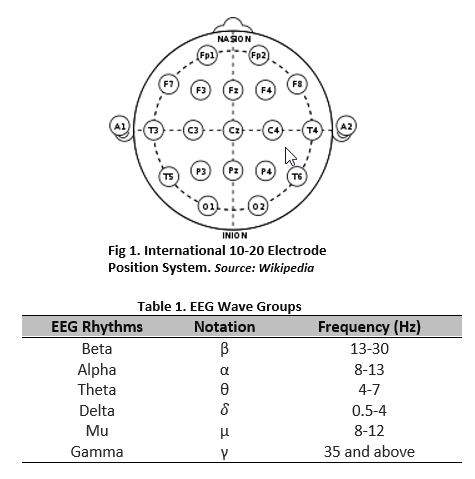
International 10-20 Electrode Positioning System
The EEG lead system specifies the electrode positioning requirements that must be enforced in order to receive EEG signals. A widely accepted procedure for identifying and implementing the position of scalp electrodes in the sense of EEG signal acquisition is the International 10-20 Electrode Positioning System. Two anatomical landmarks serve as the guide for the whole method of electrode positioning (Fig.1). The Nasion is the point just above the nose and Inion bridge, which is the point of the skull from the back of the ear. Table 1 illustrates the various waveforms which generated from the human brain.
 .
.
Brain computer interfaces for robot control
The BCI input is a brain signal that carries insightful neural characteristics, captured by electrodes either in the brain or on the scalp. BCI outputs are used to power equipment such as an assistive arm, a wheelchair, or a prosthetic limb. BCI uses algorithms to convert the recorded brain wave behavior into command signals to control the output system. Figure 2 shows a simple illustration of a BCI framework. This diagram explains the brain functions, signal acquisition, extraction of the signal function, transmission of the signal feature and some potential outputs.
 .
.
Latest BCI-System Researches
BCI Controlled Assistive Robot
Scientists at the University of Cassino and Southern Lazio, in Italy, have recently established a cutting-edge design that allows an assistive robot to work through a brain machine interface (BCI) based on P300. The researchers built framework focused on a light robot manipulator. Essentially, this manipulator receives user�s high-level commands through a P300 paradigm-based BCI. Throughout psychology, P300 waves are reactions elicited by the brain of a human being during the decision taking phase.
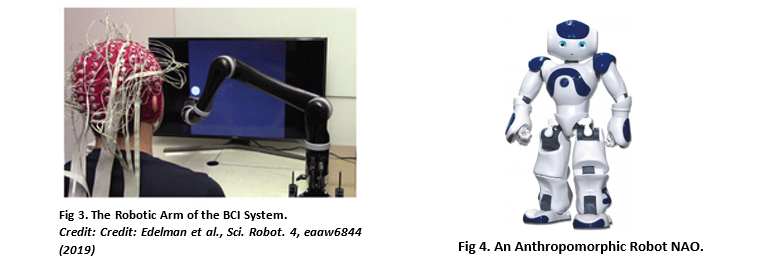
7-Degree Robotic Freedom Arm
Using a non-invasive brain-computer interface, researchers at Carnegie Mellon University, in partnership with the University of Minnesota, have created a groundbreaking mind-control robotic arm device. The device may be implemented without treatment to patients, thereby reducing the related risks. Figure 3 illustrate The Robotic arm of the BCI system. Users regulated the 2D continuous movement of a 7-degree robotic freedom arm to monitor a rapidly shifting target on a computer screen.
 .
.
Anthropomorphic NAO robot
A 23-degree-mobility anthropomorphic NAO robot (Fig. 4) can be used as a handheld computer to communicate with a patient and execute basic actions. These mobile robots have been operated by BCI by issuing high-level commands (supervisory control). Supervisory operation of NAO was carried out by simulating the pressing of monitoring keys with different fingers: four types of controls were formed: Forward, Stop, Right and Left. Experiments have shown the feasibility of teaching the BCI classifier to identify these commands and to monitor the cart and the robot.
Future of BCI Involved Robotics
BCI with the integrated hierarchical EEG pattern classifier was offered as an illustration of the creation of efficient EEG signal processing BCI systems. This recognition method learns to understand imagined muscle orders not only by hands or legs, but also by small body segments (fingers on one hand). Further creation of successful BCI-based robot remote control systems includes new methods to improve the precision and pace of the detection of EEG signals, as well as new strategies to increase the degree of BCI independence and to reduce the computing resources needed for the implementation of BCI. Solving such issues would build successful BCIs that will allow people with reduced motor skills to operate robotic devices utilizing brain signals and will greatly increase their quality of life in the community of healthy people.
Eng. H.M.K.K.M.B. Herath
B.Tech Eng, AMIE(SL), AEng EC(SL), MIEEE
Department of Mechanical Engineering, Faculty of Engineering Technology
The Open University of Sri Lanka.
Email: kasunherathlive@gmail.com